 At the end of 2012 and in January this year I played around with volumetric clouds. My first clouds I introduced in a rush where just big billboards with a value noise texture. I was relatively satisfied until a friend of mine came up with an improved billboard based approach in the game Skytides. He used Fourier Opacity Maps to compute volumetric shadowing. By the way this technique is very nice to get shadows for particles and other alpha blended objects. Now I was interested in real volumetric clouds in a real time context.
At the end of 2012 and in January this year I played around with volumetric clouds. My first clouds I introduced in a rush where just big billboards with a value noise texture. I was relatively satisfied until a friend of mine came up with an improved billboard based approach in the game Skytides. He used Fourier Opacity Maps to compute volumetric shadowing. By the way this technique is very nice to get shadows for particles and other alpha blended objects. Now I was interested in real volumetric clouds in a real time context.
My first idea was to use ellipsoids and write a closed form ray casting which should be done in real time. Together with some noise they should form up single clouds. In the end the number of ellipsoids was limited and the quality bad.
So what comes next?
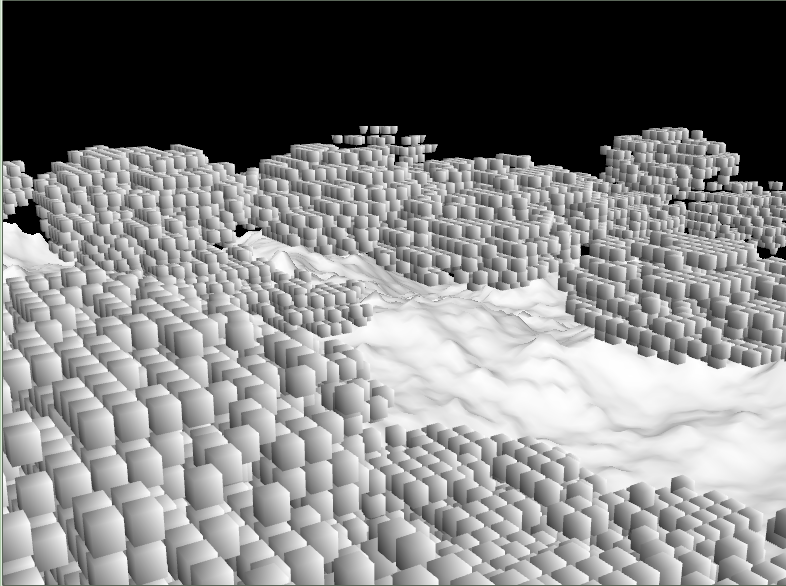
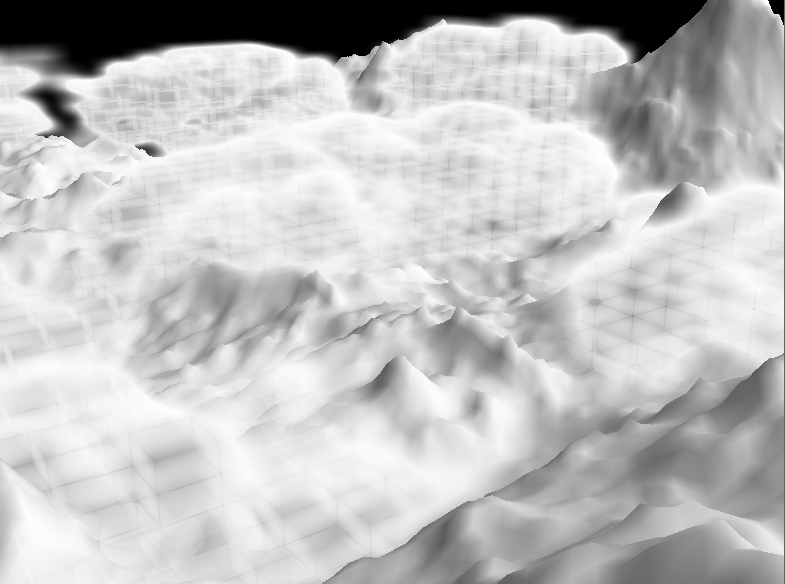
Ray tracing seemed to be the only promising step. I found some interesting stuff about cellular automatons for clouds by Dobashi. Nishita and co. So I tried to implement a ray marching on an integer texture where each bit is a voxel. In each voxel the boundary hit point to the next voxel can be computed in closed form too. This idea guaranteed an optimal step width but creates a very blocky look. I used dithering and interpolation which produced good quality results but was slow or too few detailed.
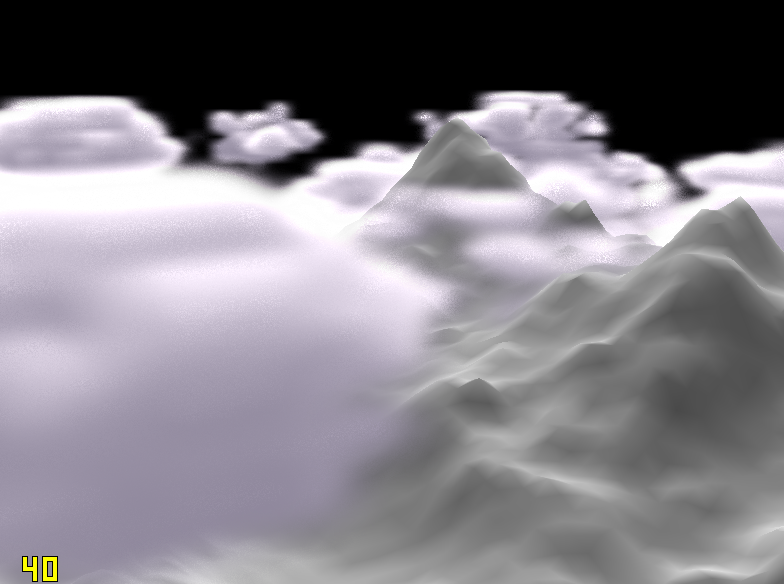
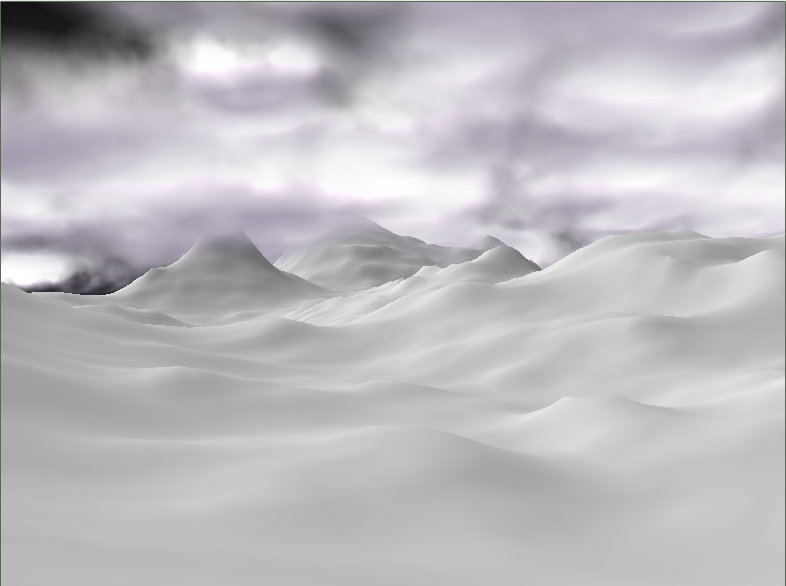
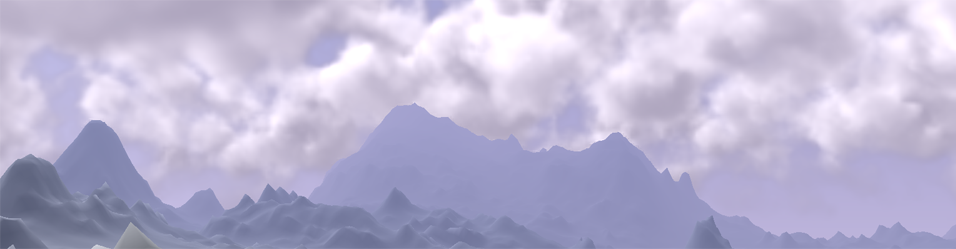
The last algorithm's results you see in the title bar of this page. It is so simple in its basics that you will hang me. The trick to get rid of block artefacts is to use fuzzy values and a linear sampler!
I use a standard ray marching (a for loop in the pixel shader) on a volume texture filled with a value noise. To animate the clouds I just move the texture around and sample twice at different locations.
To get clouds you need several rays: the fist ray accumulates the alpha values along the view direction. To get a volumetric lightning a ray into the lights direction is casted at each point which is not totally transparent. It took me some time to find a proper accumulation of alpha values. Assuming  where 1 means an opaque value than
where 1 means an opaque value than  must be computed per step on the ray.
must be computed per step on the ray.  is the amount of background shining through the clouds. Finally the alpha value of a cloud is
is the amount of background shining through the clouds. Finally the alpha value of a cloud is  . There are different reasons to stop the ray casting:
. There are different reasons to stop the ray casting:
- The scene depth is reached (this makes things volumetric - of course the scene depth buffer is required)
- The view distance is exceeded
- is close to 0
If you wanna have a good visual appearance this is enough! Stop reading her implement it and you will be done in a few hours.
Now comes the part of making things fast.
1. One ray into light direction per pixel on the primary ray - REALLY?
Yes! But no complete ray. I used a constant length ray of 6 steps. One might use the same alpha accumulation technique but just summing the density produces good results. The thing why this can work fast is to have relatively dense clouds. The primary ray is stifled after a few steps once it reaches a cloud. So there are not more light-castings than relevant.
2. What step size to choose?
The bigger the steps the fewer samples are necessary and everything gets faster and uglier. But in distance a small stepping ray is an overkill. I found a linear increasing step width ok.
3. Obviously clouds are smooth. They are so smooth you can put a 5x5 Gaussian filter onto it without seeing any difference. So why compute so many pixels with so expensive ray marching?
This part is the hardest and the reason for the "Offscreen Particles" in the title. All the nice things implemented so far could be computed on a 4 or 8 times smaller texture and than sampled up to screen size. I do not have screen shots of the upcoming problems when sampling alpha textures up but the GPU Gems 3 article has.
My solution works with only two passes the cloud pass and the upsampling. It is even not necessary to sample the z-buffer down.
The first pass renders the clouds to a small offscreen texture. It just fetches a single depth value at the current pixel position * 4 + 1.5. The 1.5 is more or less the centre of the represented area and must be changed if an other scaling factor than 4 is chosen. The output is: (Light intensity, Cloud Alpha, Sampled Z). The last component is the key. It remembers the actually used depth for later.
During the upsampling the linear interpolated texel from the cloud texture is taken. In case that (abs(Scene Z - Sampled Z) > threshold) the value taken from the clouds is not representative for the scenes pixel. This happens only at edges where we would get the artefacts. Now I take the 8 neighbourhood samples and search for the one with the smallest deviation from the scene depth. The so chosen representative is very likely a good approximation. There is no guarantee to find a better pixel but subjectively all artefacts are released. You might find some if directly searching for them. If someone has an idea how to do a more elegant search than you see in the shader below, please let me know.
In the following shader I used a doubled view distance and a distortion to get a better horizon. There also might be other not explained noise from other experiments.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 |
#version 330 layout(std140) uniform Transformation { mat4 mView; mat4 mProjection; mat4 mViewProjection; mat4 mInverseViewProjection; vec3 vCameraPos; vec3 vCameraDir; float fNearClipPlane; vec3 vCameraUp; float fFarClipPlane; }; layout(pixel_center_integer) in vec4 gl_FragCoord; in vec3 vs_WorldPos; uniform vec4 u_vParameter; // (Voxel Density, Noise Threshold, 1-Noise Threshold, Scale) uniform vec2 u_fPlanes; // Lower and upper volume limit uniform vec2 u_vHighToVolume; // MAD transformation from World.y to [-1, 1] in the volume uniform vec3 u_vColorBright; uniform vec3 u_vColorDark; uniform vec3 u_vWind1; uniform vec3 u_vWind2; uniform sampler3D u_Noise; uniform sampler2D u_Depth; const vec3 c_vLight = vec3( 0.707106, 0.707106, 0.0 ); out vec4 fs_Color; // Density function. float DensityFunction( vec3 _vPos ) { float fDensity = _vPos.y * u_vHighToVolume.x + u_vHighToVolume.y; fDensity = fDensity*fDensity; fDensity = - u_vParameter.y - fDensity*u_vParameter.z; float fAlpha = u_vParameter.x * max( 0, texture( u_Noise, _vPos * u_vParameter.w + u_vWind1 ).r + fDensity ); fAlpha *= u_vParameter.x * max( 0, texture( u_Noise, _vPos.yxz * u_vParameter.w + u_vWind2 ).r + fDensity ); return fAlpha; } // The ray marcher differs from the main one: // - stop after n steps, no depth test // - no alpha testing // - no call of lightocclusion float lightocclusion( vec3 _vPos, vec3 _vDir ) { float fDens = 1.0; for( int i=0; i<6; ++i) { // Next pos first - starting at the already sampled point. float fLen = 1.3; // A little bit larger (light tends to produce less artefacts) _vPos += _vDir * fLen; fDens += DensityFunction( _vPos ); } return fDens; } // Main ray marching function // The step length is dynamic and depends linearly on depth. vec3 density( vec3 _vPos, vec3 _vDir, vec3 _vLight, float _fZ ) { vec3 vRes = vec3( 1, 0, length( _vPos - vCameraPos ) ); // density, light and final depth float fRefY = _vDir.y; while( (_fZ > vRes.z) && ((_vPos.y-0.0001) < u_fPlanes.y) ) { float fStepWidth = 0.6 + 0.006 * vRes.z; float fLen = min( _fZ-vRes.z, fStepWidth ); float fAlpha = DensityFunction( _vPos ) * fLen; // Make clouds more transparent in the depth (instead of depth fog) fAlpha *= 1.0 - vRes.z / (2*fFarClipPlane); // Lightning if( fAlpha > 0.0001 ) { vRes.y += fAlpha/lightocclusion( _vPos, _vLight ) * vRes.x; vRes.x *= 1 - fAlpha; // "Alphatesting" if( vRes.x < 0.004 ) return vec3( 0, vRes.y, vRes.z ); } // 1 Use this line(s) to get a spherical effect at horizon _vDir.y = fRefY + 0.25 * max(0,vRes.z - fFarClipPlane) / fFarClipPlane; vRes.z += fLen; _vPos += _vDir * fLen; } return vRes; } void main(void) { // Calculate the ray from camera through the cloud volume vec3 vDir = vs_WorldPos - vCameraPos; vDir = normalize( vDir ); // The position is at least 4 times fNearClipPlane away from the camera (stability of plane transformation) // But ray should start at near plane. vec3 vStart = vs_WorldPos - 3.0f * fNearClipPlane * vDir; // Project into volume if outside y range float fMaxDist = fFarClipPlane-fNearClipPlane; float fProjDist = ( - max( vStart.y-u_fPlanes.y, 0 )) / vDir.y; if( u_fPlanes.x-vStart.y > 0 && vDir.y < -0.01 ) fProjDist = fMaxDist; vStart = vStart + fProjDist * vDir; // Where to end? ivec2 vTex = ivec2(gl_FragCoord.x*4+1.5, gl_FragCoord.y*4+1.5); float fZ = texelFetch( u_Depth, vTex, 0 ).r; // Compute linear depth from OpenGL projection float f_n = fFarClipPlane - fNearClipPlane; fZ = (- fFarClipPlane * fNearClipPlane / (fZ*f_n-fFarClipPlane)); fZ = ( ( fZ >= fFarClipPlane ) ? (fFarClipPlane*2) : fZ ); // If the ray hits the cloud volume vec3 vRes = density( vStart, vDir, c_vLight, fZ ); fs_Color.r = vRes.y; fs_Color.g = (1-vRes.x); // The 0.5 is due to the fact that I compute clouds up to viewdistance*2 fs_Color.z = 0.5 * fZ / fFarClipPlane; } |
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 |
#version 330 layout(std140) uniform Transformation { mat4 mView; mat4 mProjection; mat4 mViewProjection; mat4 mInverseViewProjection; vec3 vCameraPos; vec3 vCameraDir; float fNearClipPlane; vec3 vCameraUp; float fFarClipPlane; }; uniform vec2 u_vCloudRes; uniform vec3 u_vColorCloudBright; uniform vec3 u_vColorCloudDark; uniform sampler2D u_Clouds; uniform sampler2D u_Scene; uniform sampler2D u_Depth; in vec2 vs_TexCoord0; in vec3 vs_WorldPos; out vec4 fs_Color; // ------------------------------------------------ // SKY // ------------------------------------------------ const vec3 AdditonalSunColor = vec3(1.0, 0.98, 0.8)/2.5; const vec3 LowerHorizonColour = vec3(0.815, 1.141, 1.54)/3; const vec3 UpperHorizonColour = vec3(0.986, 1.689, 2.845)/3; const vec3 UpperSkyColour = vec3(0.16, 0.27, 0.63);//*0.8; const vec3 GroundColour = vec3(0.31, 0.41, 0.7)*0.8; const vec3 LightDirection = vec3( 0.707106, 0.707106, 0.0 ); const float LowerHorizonHeight = -0.4; const float UpperHorizonHeight = -0.1; const float SunAttenuation = 2; vec3 ComputeSkyColor( in vec3 ray ) { vec3 color; // background vec3 vExtraColor = u_vColorCloudDark * 1.3; float heightValue = ray.y; // mirror.. if(heightValue < LowerHorizonHeight) color = mix(GroundColour, LowerHorizonColour, (heightValue+1) / (LowerHorizonHeight+1)); else if(heightValue < UpperHorizonHeight) color = mix(LowerHorizonColour, vExtraColor, (heightValue-LowerHorizonHeight) / (UpperHorizonHeight - LowerHorizonHeight)); else color = mix(vExtraColor, UpperSkyColour, (heightValue-UpperHorizonHeight) / (1.0-UpperHorizonHeight)); // Sun float angle = max(0, dot(ray, LightDirection)); color += (pow(angle, SunAttenuation) + pow(angle, 10000)*10) * AdditonalSunColor; return color;//min(vec3(1,1,1), color); } void main() { // Sample the cloud from low res picture (with 4 neighbourhood), // the scene and the depth vec3 vColorCloud0 = texture( u_Clouds, vs_TexCoord0 ).rgb; vec3 vColorScene = texture( u_Scene, vs_TexCoord0 ).rgb; float fZ = texture( u_Depth, vs_TexCoord0 ).r; // Transform Z and test again (this removes artefacts where clouds overlay // the scene). float f_n = fFarClipPlane - fNearClipPlane; fZ = 0.5 * (- fNearClipPlane / (fZ*f_n-fFarClipPlane)); // Is it a background pixel? vec3 vRay = vs_WorldPos - vCameraPos; vec3 vBackColor = ComputeSkyColor( normalize( vRay ) ); if( fZ >= 0.49999 ) { vColorScene = vBackColor; fZ *= 2; } else { // depth fog vColorScene = mix( vColorScene, GroundColour, 2*fZ ); vColorScene = mix( vColorScene, vBackColor, 4*fZ*fZ ); } // Has current pixel totaly wrong depth? vec2 vLightDensity = vColorCloud0.rg; float fZError = abs(fZ - vColorCloud0.z); if( fZError > 0.01 ) { // Choose the cloud sample, which has the best fitting depth. ivec2 vCloudTex = ivec2( u_vCloudRes * vs_TexCoord0 ); vec3 vColorCloud1 = texelFetch( u_Clouds, vCloudTex+ivec2(-1, 0), 0 ).rgb; vec3 vColorCloud2 = texelFetch( u_Clouds, vCloudTex+ivec2( 1, 0), 0 ).rgb; vec3 vColorCloud3 = texelFetch( u_Clouds, vCloudTex+ivec2( 0,-1), 0 ).rgb; vec3 vColorCloud4 = texelFetch( u_Clouds, vCloudTex+ivec2( 0, 1), 0 ).rgb; vec3 vColorCloud5 = texelFetch( u_Clouds, vCloudTex+ivec2( 1, 1), 0 ).rgb; vec3 vColorCloud6 = texelFetch( u_Clouds, vCloudTex+ivec2( 1,-1), 0 ).rgb; vec3 vColorCloud7 = texelFetch( u_Clouds, vCloudTex+ivec2(-1, 1), 0 ).rgb; vec3 vColorCloud8 = texelFetch( u_Clouds, vCloudTex+ivec2(-1,-1), 0 ).rgb; vec4 vZEs = abs( vec4( fZ - vColorCloud1.z, fZ - vColorCloud2.z, fZ - vColorCloud3.z, fZ - vColorCloud4.z ) ); vec4 vZEs2 = abs( vec4( fZ - vColorCloud5.z, fZ - vColorCloud6.z, fZ - vColorCloud7.z, fZ - vColorCloud8.z ) ); vLightDensity = (vZEs.x < vZEs.y) ? vColorCloud1.rg : vColorCloud2.rg; fZError = min( vZEs.x, vZEs.y ); vLightDensity = (vZEs.z < fZError) ? vColorCloud3.rg : vLightDensity; fZError = min( vZEs.z, fZError ); vLightDensity = (vZEs.w < fZError) ? vColorCloud4.rg : vLightDensity; fZError = min( vZEs.w, fZError ); vLightDensity = (vZEs2.x < fZError) ? vColorCloud5.rg : vLightDensity; fZError = min( vZEs2.x, fZError ); vLightDensity = (vZEs2.y < fZError) ? vColorCloud6.rg : vLightDensity; fZError = min( vZEs2.y, fZError ); vLightDensity = (vZEs2.z < fZError) ? vColorCloud7.rg : vLightDensity; fZError = min( vZEs2.z, fZError ); vLightDensity = (vZEs2.w < fZError) ? vColorCloud8.rg : vLightDensity; } vec3 vFinalCloudColor = mix( u_vColorCloudDark, u_vColorCloudBright, vLightDensity.r ); fs_Color.rgb = mix( vColorScene, vFinalCloudColor, vLightDensity.g ); fs_Color.a = 1; } |
All together this runs with >50 fps on my laptop's Intel chip - in full HD:
Nice article!
Have you also tried out exponential raised step-widths? Would sound more intuitively to me.
I retested the approach with a quadratic increase (just change line 71). While standing still the scene looks good but when moving with the camera it flickers at the horizon. This was still the case when I made the step length so small that the performance was worse than with linear increase.
I think this is mathematically reasonable too: In the perspective view the screen space distance between two points A,B is |A/z-B/z| = |A-B|/z. Using a linear increasing step width means to use a constant width in respect to the screen space.